基于FPGA的超声波测距系统开发流程可分为以下五个阶段,每个阶段包含关键开发步骤和技术要点:
一、需求分析与系统架构设计
功能定义
核心功能:超声波测距(2cm-5m)、实时数值显示、LED距离区间指示、蜂鸣器报警
性能指标:±1cm精度、50ms更新速率、多级LED亮度控制
硬件架构规划
FPGA选型:需至少4个IO引脚(触发、回波、蜂鸣器、LED控制)
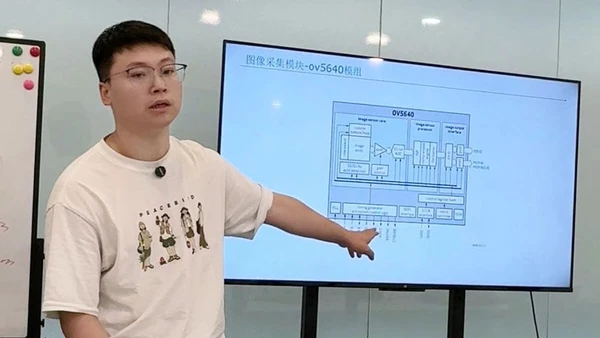
外设接口:数码管驱动电路(动态扫描)、超声波模块(HC-SR04)、报警蜂鸣器(有源型)
时钟域划分
主时钟:50MHz系统时钟
分频需求:超声波触发时序(μs级)、数码管扫描(kHz级)、报警音调(Hz级)
二、超声波测距模块开发
硬件连接设计
触发信号:FPGA输出5V脉冲(需电平转换电路)
回波信号:施密特触发器整形后接入FPGA,消除信号抖动
时序控制逻辑
触发阶段:每20ms生成50μs高电平脉冲
测量阶段:精确计量回波高电平持续时间
计算模型:距离=(高电平时间×声速)/2,声速按340m/s计算
抗干扰处理
添加数字滤波器:连续3次有效测量取平均值
异常值剔除:设置50cm最大有效距离阈值
三、人机交互模块开发
数码管显示系统
动态扫描机制:三位数码管以1kHz频率轮询点亮
数据转换模块:二进制转BCD码,支持0-999cm显示
消隐处理:测量更新时关闭显示防止闪烁
LED距离指示
区间划分:4级距离指示(如0-20cm亮1灯,20-40cm亮2灯)
亮度控制:PWM调光(500Hz频率,占空比随距离渐变)
蜂鸣器报警
触发逻辑:当距离<10cm时启动报警
报警模式:距离临界时持续蜂鸣,接近临界时间歇鸣响
四、系统集成与调试
模块协同设计
数据流控制:测距模块→显示更新→LED/PWM生成→报警判断
时序对齐:确保显示刷新率与测量速率同步
分阶段验证流程
单元测试:单独验证触发信号波形、回波计时精度
集成测试:观测数码管显示与实物距离的对应关系
压力测试:模拟快速移动目标检测系统响应速度
调试工具应用
虚拟示波器:通过SignalTap II观测内部信号时序
物理测量:使用数字示波器验证实际触发脉冲宽度
五、系统优化与扩展
性能提升措施
温度补偿:集成DS18B20传感器动态修正声速值
多模式切换:通过拨码开关选择显示单位(cm/inch)
低功耗设计:空闲时关闭未使用模块时钟
可靠性增强
添加看门狗电路:防止程序跑飞
EMC防护:信号线添加磁珠滤波
异常恢复:检测到连续5次异常自动复位
生产测试方案
标定流程:在标准距离点(如50cm)进行系统校准
自动化测试:通过UART接口批量读取测距数据
典型开发问题解决方案
回波信号抖动
解决方案:硬件端增加RC滤波电路,软件端添加边沿检测窗口
LED显示频闪
处理方法:提高扫描频率至800Hz以上,优化PWM占空比
蜂鸣器误触发
应对措施:设置10cm以下距离需持续检测3个周期才触发报警
长距离测量不稳定
改进方案:在400cm以上距离启用脉冲压缩技术
开发过程中建议采用迭代开发模式,每个功能模块完成后立即进行联合调试,推荐使用ModelSim进行前期仿真验证。最终系统需通过高低温测试(-10℃~+60℃)、振动测试等环境可靠性验证。