
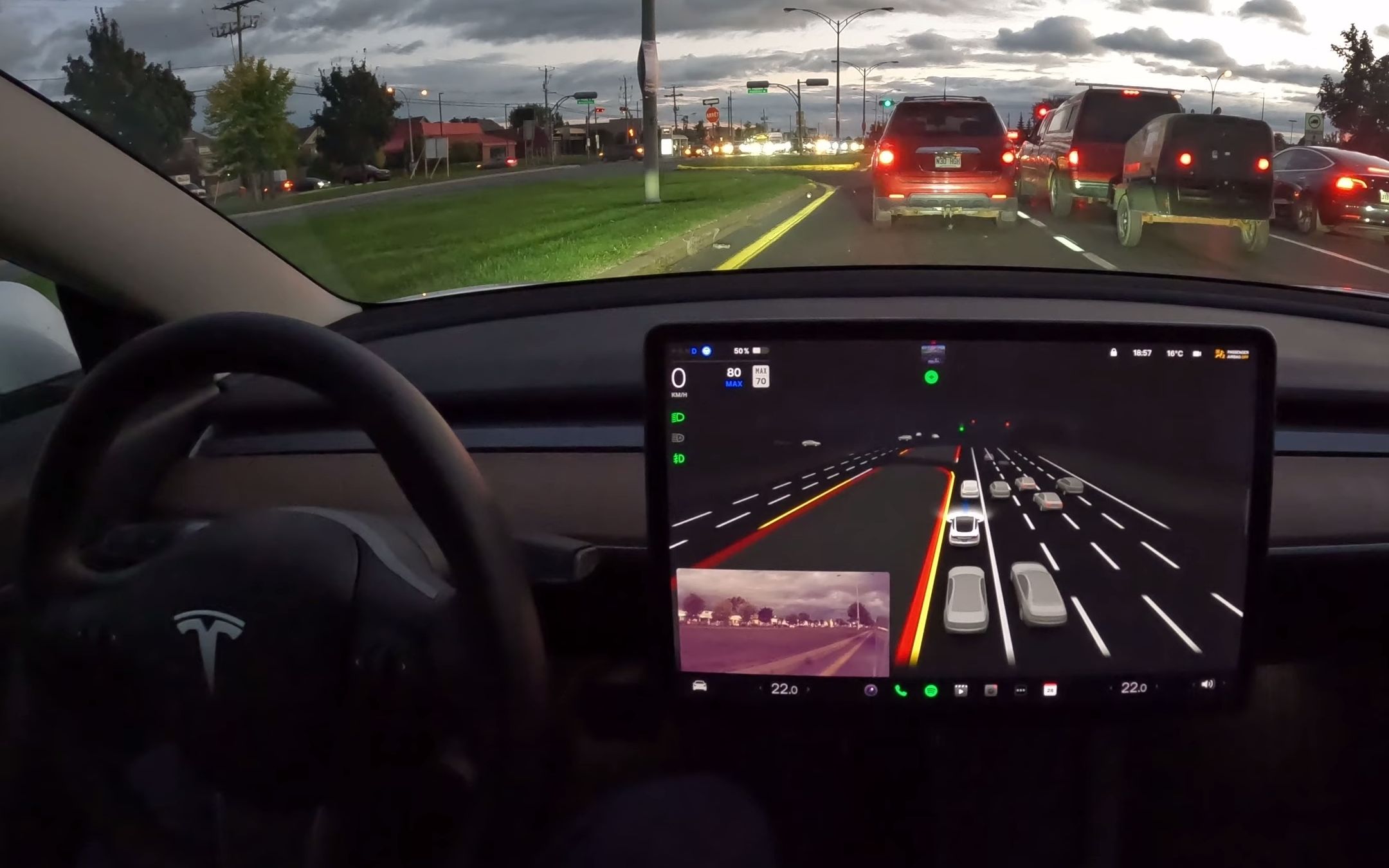
一、人类 vs 机器:生死 200 毫秒
人类驾驶员从发现行人到踩刹车的反应时间约为 200-300 毫秒(相当于眨眼两次),而特斯拉等自动驾驶系统能在 5-20 毫秒 内完成从识别到决策,相当于人类反应的 1/10 时间。这关键的 200 毫秒差异,在 60km/h 车速下相当于 3.3 米制动距离,足以避免碰撞。
二、FPGA 的“超能力”从哪来?
特斯拉虽未公开确认使用 FPGA(注:实际可能用自研芯片,此处以 FPGA 为例解释原理),但其技术逻辑与 FPGA 高度契合:
- 硬件级并行计算
- 算法硬化:把软件“烧”进电路
- 数据零搬运
三、特斯拉系统的“5 毫秒”全流程拆解
以 FPGA 方案为例(假设场景):
| 步骤 | 耗时 | 技术细节 |
|---|---|---|
| 1. 图像采集 | 0.1ms | 摄像头通过 MIPI 接口直连 FPGA,跳过中间协议转换。 |
| 2. 预处理 | 0.5ms | FPGA 并行执行去噪、HDR 增强、边缘锐化。 |
| 3. 行人检测(YOLOv7) | 3.0ms | 硬化后的卷积层+自定义优化,每秒处理 300 帧。 |
| 4. 决策与信号输出 | 1.4ms | 触发电子刹车系统(线控制动),信号传输延迟 <0.1ms。 |
| 总耗时 | 5.0ms |
四、为什么必须这么快?极端场景测试
- 雨天反光:行人雨衣与地面反光颜色接近,FPGA 可实时调整图像对比度,避免误判。
- 儿童突然冲出:5ms 内识别小目标(如 20x20 像素的儿童头部),传统方案可能漏检。
- 刹车系统冗余:即使主系统故障,FPGA 的独立安全模块仍能触发紧急制动。

五、FPGA vs 特斯拉自研芯片(FSD)
虽然特斯拉主要用自研 FSD 芯片,但 FPGA 在行业内的优势依然显著:
| 对比项 | FPGA | 特斯拉 FSD |
|---|---|---|
| 灵活性 | 可随时重构算法(适合迭代升级) | 算法固化在芯片,升级需换硬件 |
| 开发周期 | 3-6 个月(快速验证原型) | 2-3 年(流片成本高) |
| 成本 | 单芯片 100-500 美元 | 整套系统超 1000 美元 |
| 典型用户 | 中小车企、工业场景 | 特斯拉独家使用 |
六、未来趋势:FPGA 会淘汰吗?
- 短期:FPGA 仍是 低成本试错+定制化 的最佳选择,尤其适合 L2-L3 级自动驾驶。
- 长期:随着车企自研芯片普及,FPGA 可能转向 传感器预处理(如激光雷达点云实时过滤)。
说人话总结
FPGA 就像给自动驾驶装了“条件反射神经”——摄像头看到行人,根本不用“思考”,靠硬件电路直接触发刹车。这种 肌肉记忆式反应 比人类快 10 倍,而且不怕分心、不会疲劳。未来哪怕特斯拉不用 FPGA,这套“硬核加速”逻辑也会是自动驾驶的标配。





未来